











Description

Jumbot 1000: la referencia en vaciado automático de big bags
El Jumbot 1000 es una estación de vaciado de big bags totalmente automatizada, diseñada para ofrecer un servicio sin intervención humana, desde la carga del big bag hasta su evacuación después del vaciado.
A diferencia de las soluciones semiautomáticas del mercado, nuestro sistema se basa en un robot industrial de alta capacidad, capaz de manipular big bags de diferentes formatos de forma totalmente autónoma.
Su diseño modular permite integrar diferentes opciones de adaptación según las necesidades de la industria, ya sea en plástico, química, agroalimentaria o cualquier otro sector que requiera la manipulación de materiales pulverulentos.
Gracias a su precisión y rapidez, el Jumbot 1000 garantiza un flujo de producción optimizado, a la vez que asegura la máxima seguridad y un perfecto control de las emisiones de polvo.
-
Eficiencia5
Una pinza de alta capacidad, una sujeción segura del big bag
El elemento clave del Jumbot 1000 es su pinza de agarre de big bag hidráulica, especialmente diseñada para manipular cargas pesadas y garantizar una sujeción óptima durante todo el ciclo de vaciado.
- Agarre inicial del big bag: la pinza se cierra alrededor del big bag lleno con una fuerza controlada, lo que permite una manipulación estable sin riesgo de caída o rotura del contenedor.
- Apertura progresiva durante el vaciado: una vez que el big bag se rompe en el embudo de vaciado, la pinza principal se abre para soltar el producto del big bag.
- Garras de sujeción del big bag vacío: Para evitar que el big bag vacío se suelte en el depósito, un segundo sistema de agarre equipado con garras o ganchos metálicos perfora la parte superior del big bag para mantenerlo suspendido hasta su evacuación.
Un robot industrial de alto rendimiento
El Jumbot 1000 se basa en un robot FANUC M-2000iA/2300, diseñado para satisfacer las exigencias de los entornos industriales más exigentes.
- Capacidad de carga: 2300 kg, lo que permite la manipulación de big bags de hasta 750 kg e incluso 1000 kg en determinadas condiciones.
- Radio de acción: 3734 mm, lo que garantiza una amplia cobertura del área de trabajo.
- Velocidad de ejecución: Desplazamiento rápido y fluido gracias al robot de 6 ejes.
- Programación intuitiva: Interfaz intuitiva y compatible con los principales estándares industriales (Profinet, Modbus, Ethernet/IP), lo que facilita la integración en líneas automatizadas existentes.
- Seguridad integrada: Sistema DCS (Dual Check Safety) que garantiza un funcionamiento totalmente seguro en un entorno restringido.
El uso de este robot permite ganar en flexibilidad en comparación con un puente grúa, al eliminar las limitaciones de espacio y garantizar un ritmo de producción mucho mayor.
Un vaciado optimizado: tolva y sistemas de craqueo adaptables
El vaciado del big bag se realiza mediante un depósito de recepción equipado con un sistema de perforación del big bag a medida, diseñado para adaptarse a las características del producto transportado.
Sistemas de craqueo disponibles:
- Cuchillas en U: Para big bags con manguito de salida y en punta para big bags con fondo perdido.
- Corte por chorro de agua: Para aplicaciones que requieren una apertura sin liberación de partículas.
- Sistemas de masaje: Complementarios para facilitar el flujo de productos densos o compactos.
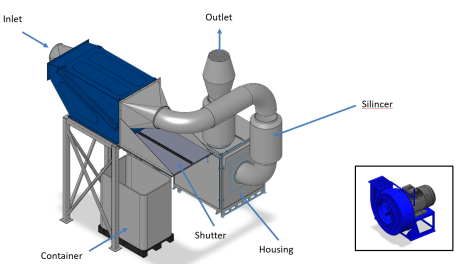
Gestión de las emisiones de polvo:
- Anillos de Pouyes: Posibilidad de integración para una captura eficaz de finos y polvo.
- Conexión a las redes de aspiración existentes: Compatibilidad con los sistemas de eliminación de polvo de la planta.
Gestión automatizada del big bag vacío
Una vez vaciado el big bag, su evacuación es totalmente automatizada gracias a las diferentes configuraciones posibles:
- Depósito en caja: Para una gestión manual por parte del operador o una reutilización posterior.
- Compactador de big bag hermético: Permite una reducción de volumen y una eliminación higiénica de los residuos.
- Triturador de big bag: Para una destrucción inmediata y un reciclaje optimizado de los materiales.
Este sistema evita la manipulación manual de los big bags vacíos, lo que reduce el riesgo de contaminación del medio ambiente y el riesgo para el operador. Esto mejora la limpieza de la planta de producción.
El Jumbot 1000, un estándar de excelencia para la industria
Con su diseño totalmente automatizado, el Jumbot 1000 representa un gran avance en el campo del vaciado de big bags. Permite:
- Una productividad optimizada, gracias a una gestión fluida y rápida de los big bags.
- Una mayor seguridad, al eliminar cualquier intervención humana en las etapas críticas del proceso.
- Una completa adaptabilidad, con opciones a medida para responder a las especificidades de cada industria.
En Palamatic Process, desarrollamos soluciones integradas para la manipulación y el tratamiento de polvos, y el Jumbot 1000 es el ejemplo perfecto. Una tecnología avanzada, un diseño robusto y una automatización total para una industria más eficiente.
Póngase en contacto con nuestros expertos para un estudio personalizado y una demostración en condiciones reales.
Modo de funcionamiento del Jumbot 1000: vaciado automatizado de big bags
Modo de funcionamiento del Jumbot 1000: vaciado automatizado de big bags
El Jumbot 1000 garantiza el vaciado 100 % automático de los big bags, desde la carga hasta la evacuación del saco vacío, sin intervención humana. Gracias a su robot FANUC de alta capacidad, su pinza hidráulica de agarre y su sistema de perforación optimizado, cada paso se ejecuta con precisión, rapidez y seguridad.
1. Agarre y posicionamiento del big bag
- El robot identifica el big bag gracias a sus sensores inteligentes y ajusta automáticamente su agarre.
- La pinza hidráulica de alta capacidad agarra firmemente el big bag, garantizando una manipulación estable.
- El robot orienta y baja el big bag sobre el embudo, con una precisa posición dinámica.
- Opción: retirada automática de las fundas de plástico antes del vaciado.
2. Vaciado controlado a través del embudo de perforación
- El big bag se presiona contra un sistema de perforación (cuchillas en cruz, en U, en V o chorro de agua) adaptado al producto manipulado.
- El producto fluye inmediatamente, optimizado por sistemas neumáticos de masaje integrados.
- Un sistema de aspiración de polvo (anillos de Pouyes) garantiza un ambiente de trabajo limpio y sin emisiones volátiles.
3. Gestión automatizada del big bag vacío
- Una vez finalizada la descarga, la pinza principal se abre y libera el big bag.
- Un gripper superior con garras perforantes toma el relevo, manteniendo el big bag suspendido sin riesgo de caída.
- El robot transporta el big bag vacío a uno de los sistemas de evacuación:
- Depósito en caja para almacenamiento temporal.
- Compactador de big bag hermético para reducir el volumen.
- Triturador de big bag para destrucción inmediata y reciclaje.
4. Supervisión e integración industrial
- El Jumbot 1000 es compatible con todos los sistemas de control industrial:
- Interfaz táctil intuitiva para gestión en tiempo real.
- Conectividad avanzada (Profinet, Modbus, Ethernet/IP) para una integración fluida en la automatización industrial.
- Sensores de control para una detección precisa del flujo de producción.
Con su proceso totalmente autónomo y seguro, el Jumbot 1000 garantiza una productividad máxima y una gestión optimizada de los big bags, respondiendo a las exigencias más estrictas de las industrias química, plástica y agroalimentaria.
Puntos fuertes del equipo
- 100 % automatizado: toma, vaciado y evacuación sin intervención humana.
- Precisión y velocidad: robot FANUC, pinza hidráulica y pinza perforadora.
- Vaciado optimizado: tolva a medida, perforación adaptada y desempolvado.
- Gestión de big bags vacíos: depósito, compactación o trituración automatizada.
Media
Nuestro equipo en fotos
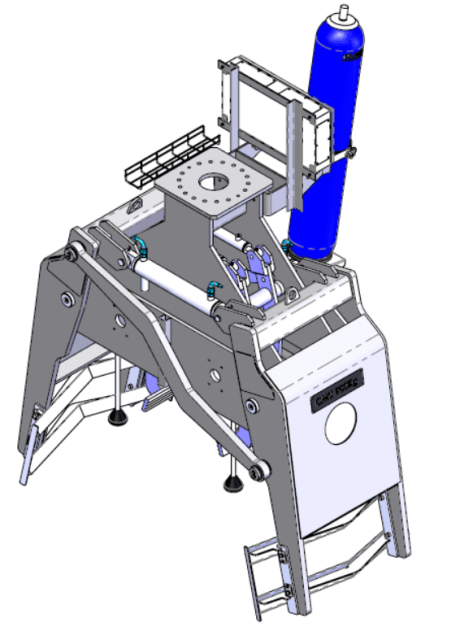
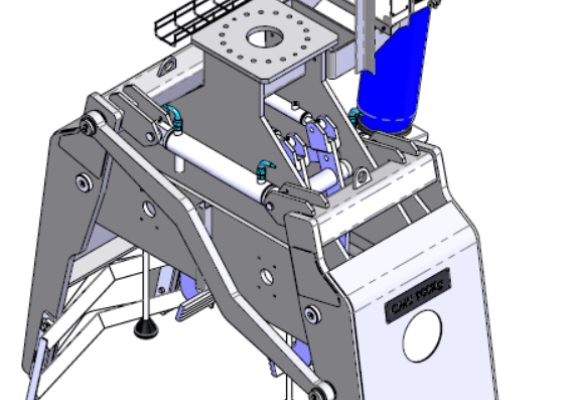
JUMBOT 1000: pinza hidráulica para la elevación segura de barriles o big bags
Pinza hidráulica específica para el JUMBOT 1000 para la manipulación de cargas pesadas

Equipo JUMBOT 1000 con pinza robotizada para manipulación automatizada
Pinza hidráulica de alta resistencia montada en el JUMBOT 1000

JUMBOT 1000 con pinza hidráulica
Detalle de la pinza del JUMBOT 1000 en posición de elevación de big bag
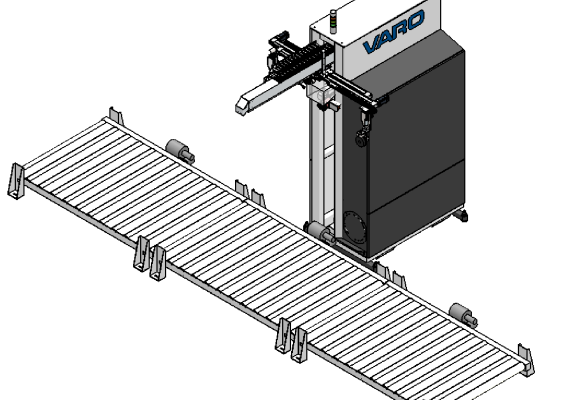
JUMBOT 1000: sistema de corte seguro de film plástico
Módulo de corte automático de film retráctil: integrado en el JUMBOT 1000
JUMBOT 1000: brazo robótico con equipo para la retirada automática de film de embalaje
Sistema de retirada de film retráctil controlado por el robot JUMBOT 1000
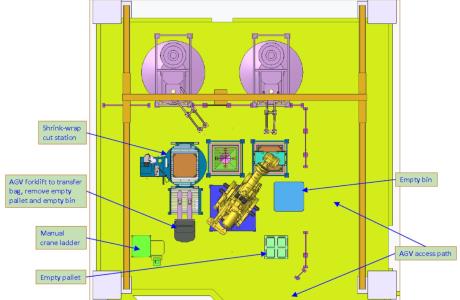
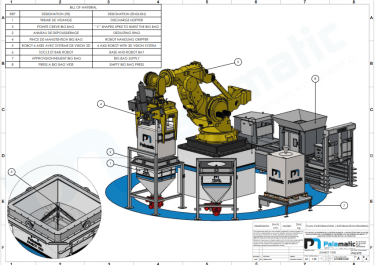
Esquema de instalación del JUMBOT 1000
Vista en planta del puesto JUMBOT 1000 con robot, big bags, transportadores y zonas AGV
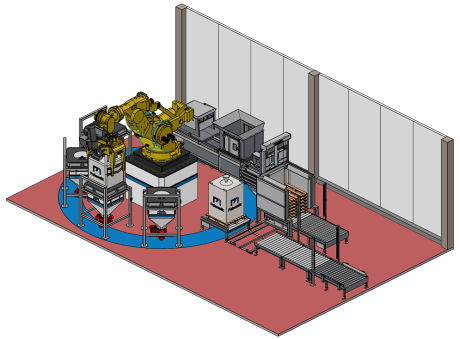
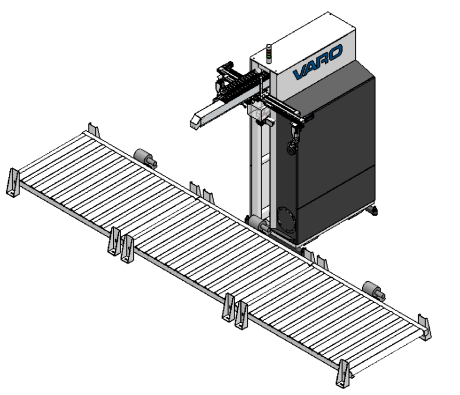
Línea JUMBOT 1000
Vista en planta de toda la línea JUMBOT 1000


Features
Las características técnicas
| Criterios | JUMBOT 1000-500S (Carga simple) |
JUMBOT 1000-500M (Carga múltiple) |
JUMBOT 1000-1000S (Carga simple) |
JUMBOT 1000-1000M (Carga múltiple) |
|---|---|---|---|---|
| Tipo de robot | FANUC M-2000iA/2300 | FANUC M-2000iA/2300 | FANUC M-2000iA/1700L | FANUC M-2000iA/1700L |
| Capacidad del robot (kg) | 2300 | 2300 | 1700 | 1700 |
| Capacidad de manipulación de big bag | Hasta 500 kg | Hasta 500 kg | Hasta 1000 kg | Hasta 1000 kg |
| Sistema de agarre | Pinza hidráulica | |||
| Sistema de seguridad | Pinza tipo "chignon" | Gancho superior para big bag | ||
| Número de puntos de carga | 1 (estándar) | Hasta 2 (multi-carga) | 1 (estándar) | Hasta 2 (multi-carga) |
| Número de zonas de vaciado | 1 (estándar) | Hasta 2 (multi-zona) | 1 (estándar) | Hasta 2 (multi-zona) |
| Sistema de corte del big bag | Opcional: cuchillas en U, cruz o corte por chorro de agua. | |||
| Tolva de descarga | Acero inoxidable 304 o 316; opción: captación de polvo, ayuda al flujo con masaje neumático | |||
| Gestión de big bags vacíos | CompactR / SchreddR / RollR opcional | |||
| Aspiración de polvo | Opcional (anillos de Pouyes) | Integrado con filtración avanzada | Opcional (anillos de Pouyes) | Integrado con filtración avanzada |
| Conectividad industrial | Estándar (Profinet/Modbus) o integración completa de Industria 4.0 (Ethernet, IoLink) | |||
Options
Opciones disponibles
-

Opciones de gestión del flujo de big bags
- Transportadores motorizados para el transporte automatizado de los big bags a la estación de vaciado.
- Sistema de corte y aspiración de las fundas para su retirada automática antes de la manipulación.
- Sistemas de pesaje integrados para un seguimiento preciso de los volúmenes vaciados.
- Gestión centralizada de los flujos a través de software industrial conectado.
-

Opciones de seguridad y optimización del vaciado automático de big bags
- Sistemas de supervisión a distancia para un seguimiento en tiempo real del proceso.
- Seguridad superior del big bag mediante pinza de moño o cuchillas de estabilización.
- Tolva personalizable con cuchillas en U, V, cruz o corte por chorro de agua.
- Sistemas de masaje neumático para fluidificar el flujo de productos densos.
- Aspiración integrada (anillos de Pouyes) para un entorno sin polvo.
-
Opciones de gestión de big bags vacíos
- CompactR: Compactador de big bags hermético para la reducción de volumen.
- SchreddR: Trituradora de big bags para la destrucción inmediata y el reciclaje.
- RollR: Compactador independiente que fabrica balas redondas de big bags.






